


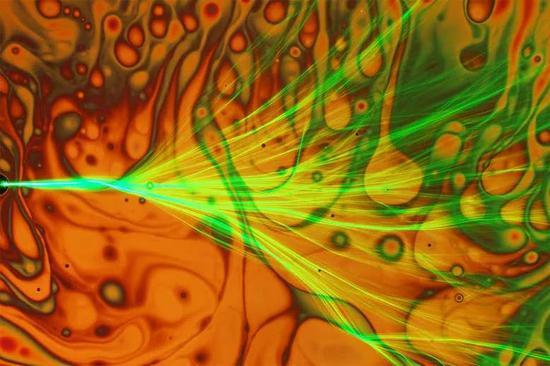
图片来源:Anatoly Patsyk, Uri Sivan, Mordechai Segev & Miguel A。 Bandres
光波在不均匀的介质中传播、受到干扰时,会偏离此前的传播方向,向各个方向散射。从蔚蓝的天空到深邃的海水,自然界的很多现象都可以用光的散射来解释。而在最新一期《自然》杂志的封面文章中,以色列理工学院的研究团队首次发现,光线可以以一种不同寻常的方式散射:形成类似于河流支流的“分支流”(branched flow)。
“分支流”现象最早是2001年在电子中发现的,在此之后,科学家又在从微波到宏观的海浪等不同波中观测到这一现象。某种波形成分支流的条件是,波的长度存在差异,并且其受到的干扰的变化长度远超波长本身。不过,人们一直没有在光波中发现这种现象。

最新研究的通讯作者Mordechai Segev表示,他们取得的这一发现同样有些出乎意料。当他们将激光固定、射向经特殊处理而保持不破裂的肥皂泡时,由于肥皂膜的厚度在随机变化,他们原本期望看到离开肥皂膜的光出现无序的斑点。但令研究人员感到意外的是,在精准的控制之下,光线分流了,并且分出来的光线会继续分流,形成无数的分支。他们进一步证实,这个通过显微镜甚至肉眼就能观测到的现象,就是光波的分支流。
研究团队指出,无论是在球面还是平面的肥皂膜上,光的分支流都会出现。当肥皂膜中的分子对光波施加作用力时,光波的作用力也会影响、轻微移动膜中的分子,从而影响光波的传播。这项发现不仅可以让物理学家更好地理解波动现象,还能帮助理解光线在时空中的传播。根据广义相对论,大质量天体会使得周围的时空弯曲。而光线通过肥皂膜球面时产生的现象,使其有可能成为研究宇宙的有效模型。
白细胞在人体内“走迷宫”的特殊技巧
一些研究发现,为了快速到达目的地,一种间充质细胞如成纤维细胞,会消化掉沿途的障碍物,留下一条可通过的隧道。这一移动策略已经相当高明,但相比之下,白细胞更胜一筹:它们不仅能在组织的细胞中穿行,不伤害其他细胞,它们的移动速度足足是成纤维细胞的100倍,累计移动速度达到每小时10万千米。
奥地利科技学院的科学家对这一现象十分惊讶,他们对白细胞移动的研究成果,发表于最新的《自然》杂志。白细胞的细胞形态有点像变形虫,能自动拉伸成各种形状。它们是血液中三种主要的细胞之一,通常情况下身体呈扁平状,可以从血管壁细胞之间溜出去。它们会向一些趋化因子产生的源头移动,找到入侵细菌、癌细胞、衰老或损伤的细胞。
但是,一旦它们从血液进入人体的组织,无疑就是进了一个天然的迷宫。虽然趋化因子的浓度能帮助它们确认方向,但通向其源头的道路依旧有很多条。研究人员发现,通过变形的身体,它们能将身体同时伸向多个方向。而最终确定那一条障碍物最少,还需归功于它们体内存在的“尺子”——细胞核。

在细胞之间移动时,白细胞的细胞核会位于细胞的前方,它能利用身体的变形性,用细胞核去测量每一条路径,最终选择出最宽的路径。与此同时,紧随细胞核的微管组织中心会把伸向其他路径的“触角”收回,防止白细胞打结。研究人员表示,虽然白细胞移动的原理比较简单,但正是因为不断重复着这一过程,它们有着惊人的移动速度,最终保护了人体的健康。
游泳比水母更快的水母机器人
在一项发表于《先进材料技术》的文章中,美国北卡罗莱纳州立大学和天普大学的研究人员开发出了以水母为灵感的软体机器人,这种机器人的游泳速度甚至可以战胜它们在自然界中的原型——水母。更重要的是,水母机器人展示了一种使用预应力聚合物改进软体机器人的新技术。
北卡罗来纳州立大学机械与航空航天工程助理教授、新研究论文的通讯作者尹杰说:“我们之前的工作主要在制造以猎豹为灵感的软体机器人,虽然这种机器人的速度非常快,但它的内脊仍然是硬质的。这次我们想制造一个完全软体的机器人,没有硬质内脊,但仍利用在两个稳定状态之间切换的概念,使软体机器人更有力和更快地移动。给我们灵感的动物之一就是水母。”
研究人员将由同一种弹性聚合物制成的两层材料粘合在一起,制造了他们的新型软体机器人。下层聚合物被拉伸,其厚度简写为hb(即Bottom layer,下层);上层内部包含一个充气通道,没有进行预应力处理,其厚度简写为ht(Top layer,上层)。
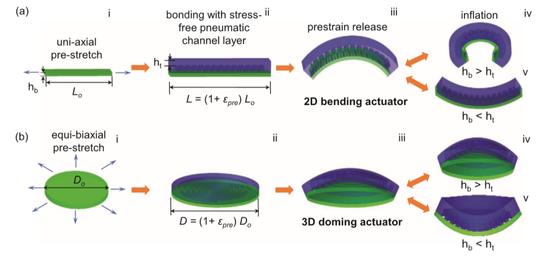
尹杰说:“我们可以通过将空气泵入通道层,使机器人能够‘弯曲’,我们通过控制预应力层的相对厚度来控制弯曲的方向。”
这个原理还解释了研究团队创造的一种可以快速爬动的软体爬虫机器人。它就像一只毛毛虫,先蜷缩起身体,然后向前跳跃,迅速释放出储存的能量。较大预应力的材料弯曲程度也越大。预应力越大,单次跳跃中能够提供的能量也更多,但同时弯曲程度的增大会减少单次步幅。所以在实验条件中,这种爬虫机器人的最快运动速度出现在预应力的中间值20%时,而非最大或最小值时。
水母机器人更为复杂,从爬虫机器人的条状二维结构变成圆形三维结构。预应力圆形层被同时向四个方向拉伸。无应力层的结构也相应变化,由环状的空气通道组成。最终形成是一个看起来像水母的圆顶。
当水母机器人“放松”时,圆顶就会弯曲起来,就像一个浅碗。当空气被泵入通道层时,结构发生反向弯曲,由“碗”变成平,再变为反向的“盘”,将水向后推出,并推动自身向前推进。在实验测试中,水母机器人的平均速度为每秒53.3毫米。相比于研究人员所考察的三种自然界水母的平均运动速度,都不超过每秒30毫米的情况下,这个表现相当不错。
最后,研究人员制造了一个三爪抓取机器人。当抓举物体时,夹具通常在“放松”状态时会打开,然后在抬升时需要能量保持抓紧的动作。但是尹杰和合作者使用预应力层来制造夹具,其默认位置是紧闭状态。打开夹持器需要能量,但一旦它们就位,夹住物体,夹持器就会返回到默认的“静止”模式,紧紧抓住货物。
尹杰说:“这样做的好处是,在运输过程中,不需要额外的能量,从而可以更有效地抓住物体。”
