

文章来源:赛先生微信公众号
追求“蝴蝶一样自由的思维”,甚至是所谓“永生”,是人类美好的梦想。站在神经科学和神经工程的角度,今天我们离这个目标还很遥远,根本的问题在于我们对大脑的工作机制,特别是信息编码的规律知之甚少。
想象一下,如果有一天你醒来发现全身动弹不得,只能眨眨眼,你会怎么办?
法国时尚杂志ELLE主编鲍比就经历了这种事情。他现在只能躺在病床上,四肢无法动弹,甚至一点声音都发不出,唯一能做的只是眨一眨左眼。语言治疗师亨瑞特对他尽心照料,鲍比想对她说声谢谢,他需要在亨瑞特一遍遍复述法语字母表的时候,眨五次眼睛,才能“拼写”出MERCI这个法语单词。鲍比因为突如其来的中风,全身肌肉瘫痪,进入了完全闭锁的状态(Locked-in Syndrome),眨动左眼是他唯一和外界交流的方式,可是他的大脑和思维是完全鲜活而正常的,这种孤独与绝望可想而知。不可思议的是,鲍比竟然靠眨眼睛“写”出了一本回忆录《潜水钟与蝴蝶》,同名电影2008年获金球奖。在我主讲的《神经工程原理》课上,每当讲到“脑机接口”(Brain Computer Interface, BCI)的时候,一定会给学生们推荐这部感人至深的电影,因为我和所有从事神经工程研究的同行们都坚信,总有一天脑机接口技术会帮助鲍比这样的病人,让他们不再生活在密闭的“潜水钟”里,通过脑电或者神经活动自由地表达自己,让思想可以像“蝴蝶”一样自由地飞翔。
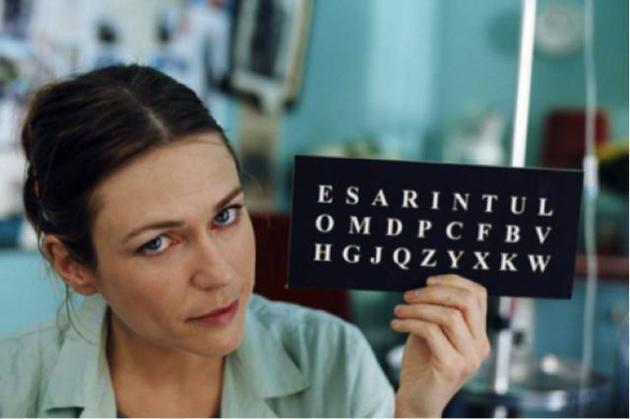
电影《潜水钟与蝴蝶》中的拼字板
其实像鲍比这样思维被封闭在瘫痪身体中的病人不在少数,著名物理学家霍金就是类似的症状,他患有肌萎缩性脊髓侧锁硬化症(ALS),也就是2014年夏天流行的“冰桶挑战”提醒公众关注的“神经渐冻症”。中国有一位年轻的神经渐冻症病人王甲,他也用“眨眼睛”的方式写了本书《人生没有假如》。“神经渐冻症”的发病原因还没有研究清楚,目前也没有治疗和康复的办法。病人在发病初期出现肌肉无力萎缩的症状,随着病程发展,逐渐失去运动、说话和吞咽能力,甚至需要呼吸机帮助呼吸。高位截瘫、重症肌无力等疾病也会带来运动和沟通的困难,他们同样需要脑机接口的帮助。
用思维控制幻灯片播放
科学家最早尝试脑机接口研究,是在1963年的英国。Burden Neurological Institute的Grey Walter医生用当时非常前沿的脑电技术和他的病人开了个“玩笑”。这些癫痫病人因为确定脑内病灶的需要,做了手术,脑内放了电极,贴近大脑皮层,可以获取非常清晰的神经活动。因为电极比较大,记录阻抗低,虽然不能记录单个神经细胞的放电,但能记录到电极周围神经细胞共同活动的场电位(Field Potentials)。这些病人会带着电极在医院生活一两周。Walter医生突发奇想,在病人们欣赏风光幻灯片的时候,偷偷把脑电电极连接到了自己发明的“电位转换器”上,把病人大脑运动皮层的场电位信号,转换成了幻灯机换片的控制信号。于是“心想事成”的奇迹发生了:病人每次打算换片,但还没有按动按钮时,幻灯机就已经知道了他的想法,自动换片了!这是脑机接口技术的第一次完整实现:采集大脑神经信号,翻译转换后控制外部设备。
这个概念在当时非常超前,只有科幻电影中才会出现。这个“玩笑”背后是Walter医生通过对脑电活动的定量测量和深入探索,发现了与注意和期待有关的脑电活动。在此之前,所谓“脑电”仅仅指每秒10次左右的节律性起伏(Alpha波),通过这种起伏可以推测人脑的警觉状态,不能反映精细的思维活动。Walter医生也是个非常优秀的工程师,他采用多次平均技术,去除噪声,得到脑电发明以来最“纯净”的脑内活动波形——事件诱发电位(Event Related Potential , ERP),从此科学家通过事件诱发电位定量研究大脑对外界视觉听觉刺激的响应规律,以及大脑内部认知过程的展开,从此打开了一扇研究人脑的新窗口。
Albany山谷里的较量
2005年左右,脑机接口研究重新成为生物医学工程的研究热点。那年夏天在美国纽约州Albany的一个山谷里召开了一次脑机接口国际会议,参加人数超过百人。因为在会前的脑机接口数据分析竞赛中,清华大学的小组获得了非常突出的成绩,我随同高上凯、高小榕两位教授一起参加了这次会议。这次会议集中了世界上最早一批进入脑机接口领域的研究者,他们对发现新的脑电诱发方法,开发脑电信号处理方法等等都有独到的创新。
大会主席是纽约州Wadsworth Center的Jonathan Wolpaw教授,他认为没有创伤的头皮脑电是脑机接口技术的未来,像霍金这样的运动残疾的病人只要带上脑电帽,就可以记录和识别一些简单的脑电活动,再加上计算机模式识别的帮助,就可以实现打字、控制轮椅等简单任务了。Wolpaw博士是一位包容的学者,他注意到另一类有创伤的脑机接口技术也取得了很大的进展,这类BCI通过外科手术,把硅电极阵列埋进大脑内部,获取大脑运动区的神经细胞放电,计算机解析后用来控制屏幕光标或机械手移动。这种技术虽然控制精细操作自如,但手术创伤的代价是不可避免的。布朗大学John Donoghue教授是有创脑机接口的主要代表,也被Wolpaw教授邀请来做大会报告。会上的争论非常激烈,有创和无创两种脑机接口技术之间的较量由此开始。
无创脑机接口:帮你“心想事成”的脑电帽
当你在阅读这篇文章时,如果戴上一个脑电帽,上面规则地排满金属电极(通常是银和氯化银电极),在每个电极位置小心地注入导电胶(通常是氯化钠和胶黏剂的混合物),让你的头皮通过导电胶和金属电极接触,再连接上生物电放大器,这时候就会在你前额和后脑勺的电极上检测到微弱的电位变化。这个电位变化反映你集中注意力的水平,但却无法检测你读到的文字和具体的思维活动。如果把我们的大脑比喻成一个巨大的体育场,那么里面的观众就是神经细胞,他们都在自由地“交谈”。要想听到每个人说话的内容,只能在每个人附近放个麦克风,这种探测只能进入体育场内。对我们的大脑来说,就要通过打开脑袋的外科手术来实现。为了避免手术创伤,我们把麦克风放在体育场外,也就是在脑袋表面贴上电极。体育场外的麦克风当然不能分辨里面每个人的讲话,但如果场内发生了很大的动静,例如大家都在为进球欢呼,场外便能听到;同样道理,贴在头皮表面的脑电电极无法分辨每个神经细胞的活动,但可以探测脑内“非常大的活动”,通常这种活动是很多神经细胞共同的活动,正如体育场里的半场或者全场欢呼。
这个例子说明脑电是个低分辨率的神经传感技术。依照电磁场理论,脑电的空间分辨率在一厘米左右,也就是说一厘米范围内的神经细胞活动,对于脑电电极来说是不可区分的。如果有人宣称可以用头皮外面的脑电来解读精细的思维活动,例如探测你正在阅读的文字、心算的数字、回忆的内容等,都是天方夜谭。
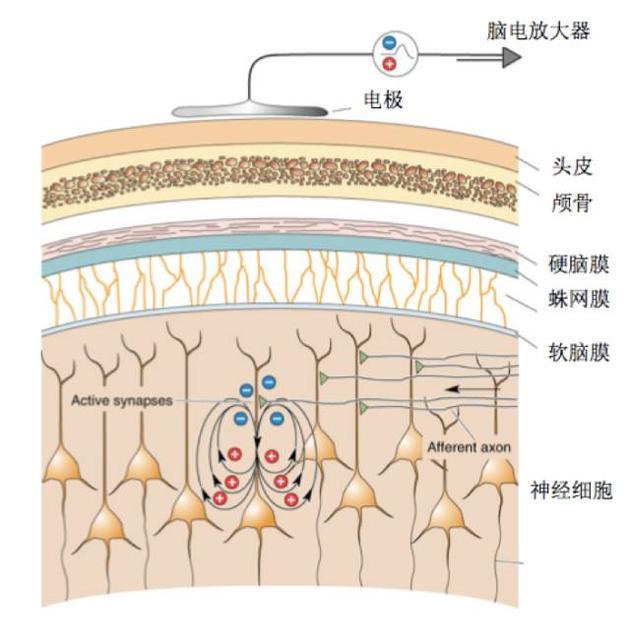
脑电产生的原理
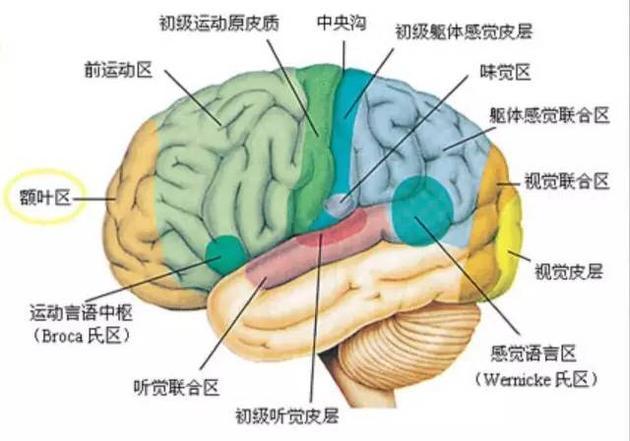
大脑皮层的功能结构。一些初级区和感官及肌肉控制有直接的关系,如触觉初级区和运动初级区。
那么,为什么Albany脑机接口大会上还有那么多人研究基于脑电的脑机接口呢?当然是因为它没有创伤,正常人也可以用。如果你能设计出精巧的视觉或听觉刺激,能让脑机接口的使用者把自己的“简单思维”通过注意力或者想象机制加载到自己的脑电波上,你就可以分析使用者的脑电波,提取出他的“简单思维”。这是一种间接的“思维解读”,实际上是把脑电作为信息的载体,有点类似通讯系统的调制和解调制。Jonathan Wolpaw的研究组就是通过研究一种和注意力有关的事件诱发电位P300来实现脑机接口打字的。P300电位是当大脑检测到小概率的外界刺激,或者在一连串重复事件中检测到新奇事件时出现的,这个电位活动最强的位置往往在头顶中央。因为电压是正的,峰值大概在事件发生后300毫秒,所以被称为P300 (P for Positive)。如果把字母表随机重复一遍,当你希望选择的那个字母出现的时候,你的头顶中央就会检测到一个P300电位,而其他不相干的字母出现时,P300电位不会出现。如果我们把26个字母和键盘按键精巧地排列起来,快速地随机在计算机屏幕上闪现,同时检测你的P300脑电,就可以分析出你要选择输入的字母。Wolpaw研究组把P300应用于脑电打字的脑机接口,取得了很大的成功。这种设计的明显的缺点是,屏幕上的字母需要不停闪烁,用户会产生视觉疲劳;另外,P300脑电波的个体差异较大,给检测算法带来挑战。
后来我的实验室提出了一种新颖并稳健的设计:借用视觉目标的移动,而不是闪烁来激发一个200毫秒负向脑电波N200 (N for Negative) 来加载信息,首次实现没有闪烁,对任何用户都很稳健的脑机接口打字。其背后的神经机制也不再是对新奇事件的响应,而是高级视觉处理——运动视觉区的响应。这两种方法的共同缺点是打字速度不够快。清华大学高上凯和高小榕两位教授的研究组用头皮表面的稳态视觉诱发电位(一种有周期性的视觉闪烁诱发的规律性脑电响应,SSVEP)搭建了快速打字的脑机接口系统,至今仍然保持最快记录。这种脑机接口的信息加载在闪烁频率上,因而可以对视觉皮层的脑电波进行频率调制或者编码调制,从而实现很快的信息传输速度,最快可以做到1秒左右打出一个字符。
也许你会觉得这样的脑机接口不够自然,还需要外界的视觉刺激来配合。能不能只是想一想,就能通过脑电读出来?由于上面提到的脑电的低分辨率,精细的“想法”是无法解读的。唯一例外是“运动想象”,当想象左手、右手或者脚的运动时,可以在头顶向两耳外侧延展的带状区域(感觉运动带)安放脑电电极,检测出这三种想象状态的差别。背后的生理基础是感觉运动带的功能划分与身体的不同部位相对应:左手的感觉运动由带状区域的右边部分负责,右手则由左边负责,形成对侧交叉,而下肢和脚部由中间区域负责;由于左右脚的负责区域都在头皮中间,所以左右脚是无法区分的。如果在这三个区域(感觉运动带的左中右)分别放上脑电电极,理想情况下,检测这三个位置的脑电活动强度变化,就可以推测你是在想象左手、右手还是脚的运动了。当然,你在真的运动手脚时,这三个位置的脑电活动变化更加清晰强烈。这个简单的对应规律,通过功能磁共振成像可以很清晰地展示出来。因为头皮表面的脑电非常微弱,有效信号只有微伏量级,而且淹没在很大的电学和生理噪声中,要准确地检测出左右手和脚的运动想象,还需要微弱信号的处理技术。感觉运动带的脑电主要能量变化集中在10赫兹和20赫兹附近,即所谓的脑电alpha波段和beta波段。通常需要把采集到的脑电信号进行滤波,把包含关键信号的alpha和beta频段能量变化提取出来,送入一个训练好的分类算法,才能最终完成对脑电信号的准确翻译。
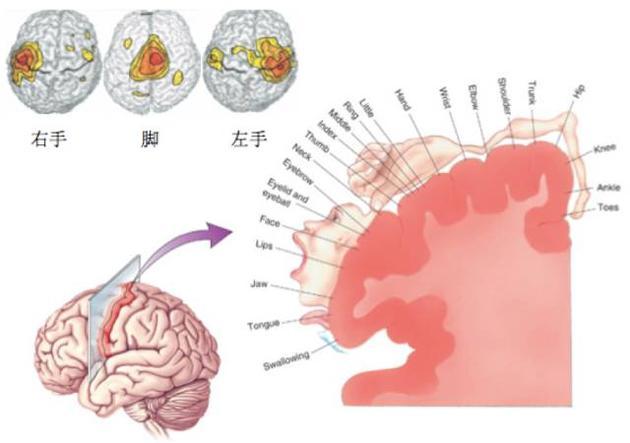
感觉运动脑区和手脚运动的对应关系
如果我们有高性能的脑电帽和放大器、识别准确率高的算法,就能让脑电波来控制屏幕光标、假肢、轮椅,甚至机器人。因为脑电只能检测出三种想象状态的差别,所以最多只能控制三个操作:左转、右转和前进。2006年夏天德国足球世界杯期间,我和高上凯、高小榕教授实验室联合开发了一套脑电控制机器狗踢足球的脑机接口系统,第一次实现了三个方向的实时运动控制。通过特殊的训练和精巧的程序设计,少数人能够控制二维和三维空间目标的移动,例如美国明尼苏达大学Bin He教授实验室演示的脑电遥控无人机飞行。最有戏剧性的演示是2014年巴西足球世界杯开幕式上的开球,这大概是历史上最特别的一次:一位下肢残疾的巴西青年在脑机接口技术的帮助下,用自己的脑电控制一套下肢外骨骼(机械假肢)踢出了第一脚球,其原理就是上面介绍的运动想象脑机接口。
这些演示犹如科幻,让人惊叹。为什么这样的技术还没有应用到临床,帮助哪些重度残疾的病人重新获得运动能力?目前的技术困难一方面在脑电极。前面交代过,要获得高质量、稳定的脑电信号,需要在电极和头皮之间注入导电胶,这种胶体适合于两小时内的短期使用,时间长了就会干结,其中的离子运动受阻,脑电信号质量会大幅度下降,直至脑机接口系统无法工作;另一方面的难点是各种干扰的存在,例如环境中的电磁噪声、使用者体表的电生理信号等,甚至使用者的心理状态也会破坏系统的稳定性,很多脑机接口的识别算法离开实验室到了家居环境就无法稳定工作了。随着新的脑电传感器(例如干电极)和识别算法的不断改进,相信未来的脑电帽一定会帮助一部分丧失运动功能的病人重新体验运动的感觉,提高生活质量。

脑机接口控制机器狗踢足球
植入脑机接口:神经芯片解读精细运动信号
既然脑电信号不够精准,不够稳定,为什么不把神经传感器放进脑内,去探测和记录每一个运动神经细胞的活动,做一个长期植入“一劳永逸”的脑机接口呢?1998年,美国创业公司Neural Signals的创始人Philip Kennedy开始尝试在人脑中植入微电极,记录运动区的神经细胞放电,希望帮助一位完全丧失运动能力的残疾人恢复与外界的交流。因为电极数目限制,他的实验展示了可能性,但解读信号的准确率远没有达到实用要求。他的初步研究以及60年代Grey Walter医生的勇敢尝试,启发了一批从事运动功能神经电生理研究的学者,其中包括布朗大学John Donoghue、匹兹堡大学Andrew Schwartz、杜克大学Miguel Nicolelis、伯克利大学的Jose Carmena等。他们都曾长期从事灵长类运动神经电生理的研究,对于猴子大脑运动皮层神经细胞控制上肢运动的规律,有着深入的理解。上面我们提到手脚运动是由对侧的感觉运动带控制的,这只是个宏观的规律,进一步的问题是,手脚运动的方向、加速度、力量等这些参数是如何通过感觉运动带的神经细胞活动来编码的?
这个问题的研究可以一直追溯到现代神经科学的奠基人、1932年诺贝尔奖获得者Charles Sherrington。他发现肌肉的控制是由脊髓中的运动神经细胞协同完成的,并非简单的一对一的控制。这个协同编码( Population Coding )的思想启发了后来的大脑运动皮层神经编码的研究,特别是1980年代初,Apostolos Georgopoulos等人发现运动皮层神经细胞是用一种“民主投票”的方式协同编码手臂的运动方向的。每个运动皮层神经细胞都有自己喜好的方向,有些喜好30度,有些45度等等,当大脑决定把手臂伸向某个目标角度时,这些运动神经细胞都会参与放电,如果目标角度和自己的喜好方向很接近,它就放电多些,反之就放电少些。形象地说就是,喜欢就”大声支持“,不喜欢就”小声附和一下“。如果把这些神经细胞的放电活动用向量来表示,向量的方向是这个细胞的喜好方向,向量的长度是每秒钟的放电次数(发放率),把所有能记录到的细胞的“放电向量” 用向量求和的方式加起来,得到的向量方向就是手臂要去的目标方向。
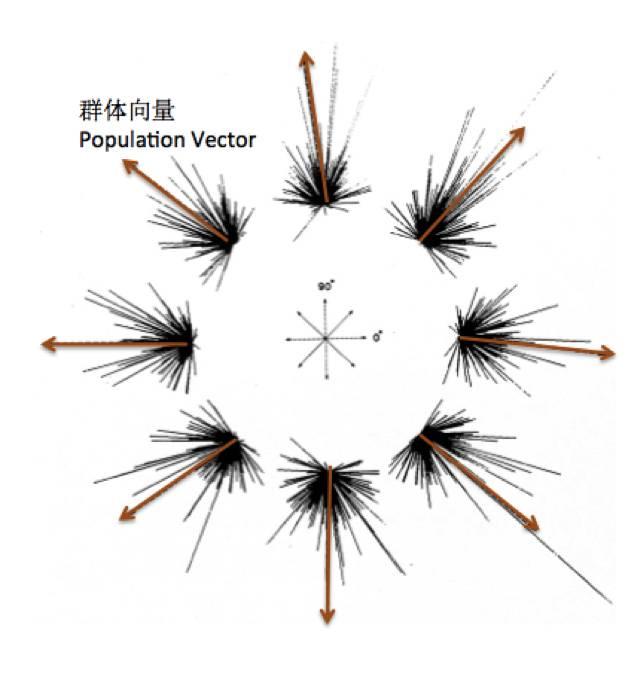
神经细胞“投票”决定运动方向
进一步的研究发现,无论运动角度,还是手臂端点的位置、运动加速度,甚至手指的力量,都可以用类似的群体协同编码的方式来实现。如果再做些数学抽象,这个群体向量编码(Population Vector Analysis, PVA),实际上就是用一组基向量(每个神经细胞喜好方向的单位向量)来张成整个二维或者三维空间,任意一个目标方向在这些基向量上的投影,就是每个神经细胞的发放率,多么完美简洁的系统!理论上,我们的运动大脑皮层只需要3个神经细胞分别对应xyz三个方向的基向量,整个三维空间就可以被完全表示了,考虑到神经细胞方法率不可能是负数,再增加3个xyz负方向的神经细胞,也就足够了。实际上我们的大脑运动皮层有成千上万的细胞参与了这个协同编码,这样的冗余并非浪费,它使得编码更加稳健可靠,其中少数细胞的“缺席”(死亡或者没有被电极捕获到)或者“偷懒”(发放率不准确),不会影响最后编码目标方向的准确性。这样的编码规律完全可以表示为一个线性关系,也就是目标方向的向量V等于“捕获”到的神经细胞的基向量A用各自发放率R的加权求和:V=A*R。虽然我们还不知道这个方程是不是运动神经细胞编码的本质,但它很好地拟合了已有的数据,甚至可以通过它来实现脑机接口所期望的解码——由神经细胞活动来推测运动方向。如果先按照预定的轨迹V’运动,同时记录神经细胞放电R’,得到一组数据后就可以求得矩阵A;开始脑机接口解码时,神经细胞放电R是可以记录到的,通过V=A*R就可以得到当前的目标方向,也就是大脑要指挥外部设备(屏幕光标、假肢等)移动的方向。
最初的植入脑机接口研究是在”训练有素“的猴子身上进行的。2002年Donoghue实验室的猴子可以用自己运动脑区的神经细胞活动控制计算机屏幕上的目标在二维平面自由移动,随后Schwartz实验室的猴子通过类似的脑机接口可以在三维空间做到自由控制,杜克大学Nicolelis实验室的猴子甚至可以遥控远在MIT的机械臂。随着电极植入技术和神经活动解读方法越来越精准,猴子可以通过脑机接口控制的参数个数越来越多。到了2008年,Schwartz实验室的猴子可以做到自如控制机械臂的10个自由度,并且用完全脑控的方式操作机械臂拿到了棉花糖喂自己,这向人们展示了植入脑机接口用于残疾人控制假肢的美好前景。
可以说,Georgopoulos的群体编码理论,加上这四只猴子”专注努力“,以及背后一大批生物医学工程学者对神经传感技术和信号处理方法的精益求精,造就了植入脑机接口灵长类研究的黄金十年。从灵长类到人类植入脑机接口的发展,应该感谢三位勇敢的重度残疾人。第一位是高位截瘫的病人Matthew Nagle,2006年他同意在自己的大脑运动皮层对应手部控制的区域植入了一个100通道的微电极阵列,这个电极阵列连接到Donoghue实验室研发的BrainGate脑机接口系统,实现了用“思维”控制屏幕光标,打开邮件,甚至玩乒乓游戏。不幸的是,第二年Matthew因为感染去世。第二位是Cathy Hutchinson,她因为中风丧失了运动能力,在BrainGate第二代脑机接口系统的帮助下,她在2012年控制机械手端起咖啡送到自己嘴边,开心地喝了一口,这是她中风15年来第一次。第三位是因为车祸截瘫的病人Ian Burkhart, 2016年在BrainGate第二代系统的帮助下,他的运动神经信号被翻译成电脉冲,来驱动他手臂上的肌肉刺激电极,让手臂肌肉按照自己的意愿重新活动起来,完成抓握、转腕、搅拌等动作,甚至可以弹两下吉他。过去15年,植入脑机接口取得了从“猴”到“人”的进步,除了神经科学家、生物医学工程师,神经外科大夫也在其中发挥了重要的作用,这三例临床实验涉及的技术细节非常复杂,无一例外都是这三方面研究者的团队合作。
看到这些激动人心的研究成果,大家也许会觉得植入脑机接口技术已经非常完美,临床应用已经近在咫尺,实则不然。到目前为止,已有15-20位重度残疾人参加植入脑机接口的临床实验,都碰到了一个难以攻克的问题:植入电极因为神经胶质细胞的包裹而逐渐失效,无法继续记录神经细胞的放电活动。上述临床实验中采用的都是犹他电极阵列(Utah Array),虽然只有4x4毫米,但上面的100个硅电极微针是要穿透大脑表面,插入神经细胞之间,才能记录到神经放电信号,必然会造成神经胶质细胞的炎症反应。最糟糕的情况下,2-3个月这些电极就会逐渐实效,长一点可以坚持2-3年,但信号质量逐渐下降,脑机接口系统的工作性能也随之下降。如果这个问题不能很好解决,长期植入就无法实现,每2-3年做一次手术更换电极的代价太大。除此以外,神经信号的无线传输也是个难题。以上这些临床研究都在病人头部安装了有线的“插头”,来传送神经信号和供电,这大大增加了感染的风险。针对这两个难题,科学家考虑了很多办法,例如通过在电极表面增加抗炎因子来减轻胶质细胞的反应;无线低功耗的神经芯片也在研制当中,甚至有人提出采用纳米尘埃扩散到神经细胞周围去形成神经尘埃(Neural Dust),通过超声供电来获取神经信号等等。
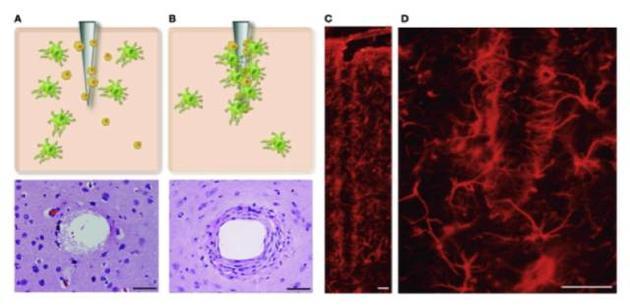
神经胶质细胞包裹电极导致记录失效
为了解决这两个难题,我的实验室2013年提出一种新的微创脑机接口思路:把神经电极只是埋入大脑皮层表面,不穿透皮层,通过少数几个电极的场电位,而不是神经放电活动,来建立脑机接口。这样可以避免神经胶质细胞的炎症反映和包裹,同时因为电极数目少,信号采样率低,可以很容易地实现无线采集和供电。这样的微创方案获取的神经信息要少于电极阵列,但长期可靠性强。为此,我们设计了一种新的脑机接口打字方法,把电极放在视觉脑区处理运动物体的高级区域,用这个区域内60赫兹以上的高频率场电位变化来分辨病人的注意力焦点,从而实现快速准确、长期稳定的脑电打字。目前我们正在和清华附属玉泉医院、解放军总医院、清华长庚医院、神经调控技术国家工程实验室李路明教授团队等合作开展临床研究,希望在不久的将来克服植入脑机接口的难题,实现和脑起搏器一样的安全性和持久性。
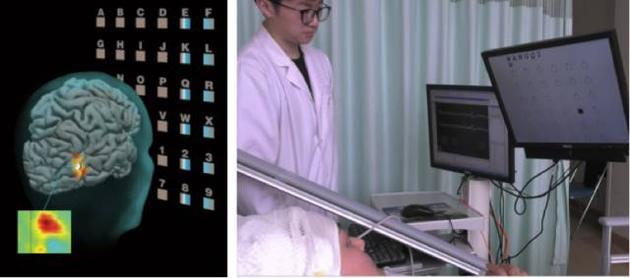
微创脑机接口临床测试
脑机接口真的能读出你的思想吗?
脑机接口是一种很有未来感的技术,和外星探索一样常常成为科幻电影的主题。在电影《阿凡达》中,人类的思维活动可以转移给“替身”(Avatar),除了控制替身的活动之外,还和替身一起经历外星球的体验,脑机接口系统在电影中是一台类似磁共振扫描仪的睡眠机器;电影《超验骇客》中,神经科学家威尔遇刺病危,他的妻子因为深爱他,通过脑机接口技术把威尔的“思维”整体传送到了互联网上,电影中脑机接口被抽象为数十个植入电极和一台超级电脑。追求“蝴蝶一样自由的思维”,甚至是所谓“永生”,是人类美好的梦想。站在神经科学和神经工程的角度,今天我们离这个目标还很遥远,根本的问题在于我们对大脑的工作机制,特别是信息编码的规律知之甚少。即使我们研究清楚这些规律,也还需要生物医学工程的方法体系将复杂的神经系统复制、转移和保存下来。我们今天已经大体知道了生命信息的编码规律,但还是不能复制生命个体,要复制意识层面的个体,难度可想而知。但这个困难,无法阻挡科学家不断研究和发展相关的方法和技术,并用它们来帮助大脑和身体损伤的病人,使他们从束缚身体的“潜水钟”里解脱出来。
脑机接口也是一个很有争议的话题,和“脑控”等话题一起常常被批评。其实这和“克隆人”、“基因编辑”等技术发展初期碰到的伦理问题类似,今天我们讨论的技术,完全没有达到读取和操控思维的水平,当前任何一种脑机接口技术都需要使用者非常主动的配合,才能把一定程度的思维活动信息读取出来。至于思维活动信息的写入,更是加倍的难。我们的思维活动在时间上是连续的,在可预见的未来还无法像基因信息那样编辑。即使如此困难,仍有勇敢者不断尝试,比如MIT的Tonegawa实验室在过去三年中先后在转基因小鼠身上,通过光遗传技术实现了一个比特恐惧信息的删除、修改和写入。他们希望用这种技术帮助人们消除病理性的恐惧,甚至治疗老年痴呆症患者的记忆障碍。这种技术在人脑上的应用,还有很多难以逾越的技术障碍,并非如媒体所宣传那样近在眼前。
也许有人会问,脑机接口技术最终会发展成什么水平?我没有答案,但可以提供科幻作家刘慈欣版的回答。他在《三体》中提到一位面壁者希恩斯,他发明了“全息思维成像”和“思想钢印”,实际上就是终极的脑机接口技术,既能精确读出,也能精确写入,这大概可以作为脑机接口技术的理论终点,可以不断接近但永远无法达到....。。(作者 洪波(清华大学医学院) 编辑 王春吉)
参考文献
[1] Walter,WG., et al. (1964). Contingent negative variation: an electric sign ofsensori-motor association and expectancy in the human brain. Nature, 203,380-384.
[2] Purves, D., et al. (2001). Neuroscience.Sunderland. MA: Sinauer Associates。
[3] Chen, X., et al. (2015). High-speed spelling with anoninvasive brain–computer interface. Proceedings of the National Academy of Sciences, 112(44), E6058-E6067.
[4] Wolpaw,JR., et al。(2002). Brain–computer interfaces for communication and control. Clinical neurophysiology, 113(6), 767-791.
[5] Zhang,D., et al. (2013). Toward a minimally invasive brain–computer interface using asingle subdural channel: a visual speller study. Neuroimage, 71,30-41.
[6] Georgopoulos,AP., et al。(1986). Neuronal population coding of movement direction。
Science, 233(4771),1416-1419.
[7] Serruya,MD., et al. (2002). Brain-machine interface: Instant neural control of a movement signal. Nature, 416(6877), 141-142.
[8] Hochberg,LR., et al. (2006). Neuronal ensemble control of prosthetic devices by a human with tetraplegia. Nature, 442(7099),164-171.
[9] Hochberg,LR., et al. (2012). Reach and grasp by people with tetraplegia using a neurallycontrolled robotic arm. Nature, 485(7398), 372-375.
[10] Velliste,M., et al. (2008). Cortical control of a prosthetic arm for self-feeding. Nature,453(7198),1098-1101.
[11] Bouton,CE., et al. (2016). Restoring cortical control of functional movement in a human with quadriplegia. Nature,533(7602), 247-250.
[12] Polikov,VS., et al. (2005). Response of brain tissue to chronically implanted neural electrodes. Journal of neuroscience methods, 148(1),1-18.
[13] Tonegawa,S. et al. (2015). Memory engram storage and retrieval. Current opinionin neurobiology, 35, 101-109.
[14] RegaladoA. (2015) The thought experiment MIT Technology Review。
https://www.technologyreview.com/s/528141/the-thought-experiment/
